
Analysis of the Working Principle of Harmonic Gear Reducer
Release Time :
2024-09-19
Source :
network
Author:
YONGKUN MOTOR
The harmonic gear reducer consists of a fixed internal toothed rigid wheel, a flexible wheel, and a wave generator that causes radial deformation of the flexible wheel. The harmonic gear reducer is a new type of transmission structure in gear reducers, which uses flexible gears to generate controllable elastic deformation waves, causing relative misalignment between the teeth of the rigid wheel and the flexible wheel to transmit power and motion.
This type of transmission is fundamentally different from general gear transmission, and has special characteristics in meshing theory, ensemble calculation, and structural design.
Harmonic gear reducers have advantages such as high precision and high load-bearing capacity. Compared with ordinary reducers, due to the use of 50% less materials, their volume and weight are reduced by at least one-third.
Composition and Structure
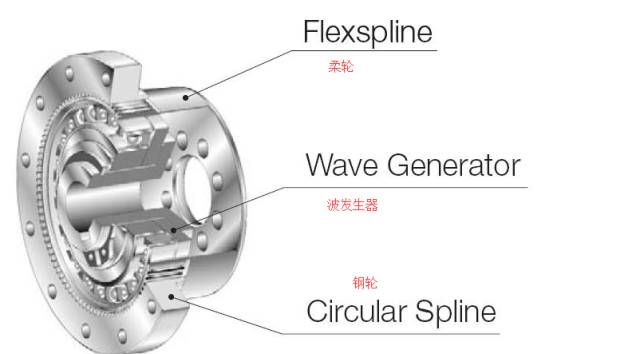
Harmonic gear reducer consists of three main components: rigid wheel, flexible wheel, and wave generator.
The fixed rigid wheel is a rigid internal gear
A flexible wheel is a thin-walled cylindrical external gear that is prone to deformation. They both have a triangular (or involute) tooth profile and equal circumferential pitch, but the rigid wheel has several more teeth than the flexible wheel (usually two teeth)
The wave generator consists of an elliptical disk and a flexible ball bearing, or a rotating arm with rollers at both ends.
Usually, the wave generator is the prime mover, and one of the flexible wheel and the rigid wheel is the driven body, while the other is a fixed component.
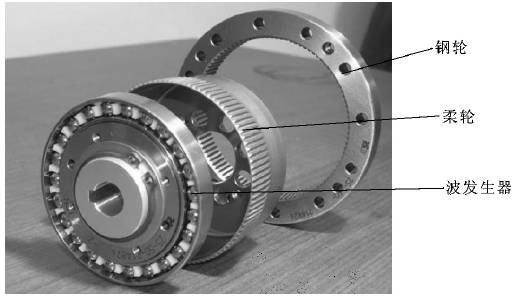
The structural composition of harmonic gear reducer
Before assembly, the flexible wheel and its inner hole are circular. When the wave generator is installed in the inner hole of the flexible wheel, due to the length of the wave generator being slightly larger than the diameter of the inner hole of the flexible wheel, the flexible wheel is stretched into an ellipse, forcing the flexible wheel to fully mesh with the fixed rigid wheel in the long axis direction of the ellipse and completely separate in the short axis direction. The teeth in other places depend on the rotation position of the flexible wheel, either in the "meshing" state or in the "meshing out" state. Due to the fixed rigid wheel, when the wave generator rotates counterclockwise, the flexible wheel rotates clockwise. When the wave generator rotates continuously, the long and short axes of the flexible wheel, as well as the positions of "engagement" and "disengagement", change continuously. The flexible wheel teeth shift from engagement to disengagement, then from engagement to disengagement, and from disengagement to disengagement. In this way, the cycle of engagement, disengagement, disengagement, engagement, and disengagement forces the flexible wheel to rotate continuously.
During the rotation of the flexible wheel with the wave generator, when one of the teeth meshes with a tooth on the rigid wheel again, the flexible wheel rotates exactly once. At this time, the wave generator rotates many times, and the ratio of the number of rotations of the wave generator to the number of rotations of the flexible wheel (1 rotation) is the reduction ratio of the harmonic gear reducer, so its reduction ratio is very large. During the entire motion process, the deformation of the flexible wheel is a continuous harmonic waveform on the unfolded diagram of the flexible wheel circumference, therefore, this transmission is called harmonic gear transmission.
Harmonic gear reducers can be divided into single wave, double wave, and three wave types based on their mechanical wave number, with the most commonly used being double wave transmission. In harmonic drive, the difference in the number of teeth between the rigid and flexible wheels should be equal to an integer multiple of the mechanical wave number, usually taken as equal to the wave number.
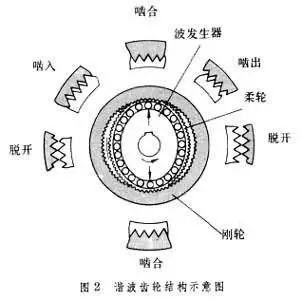
Schematic diagram of meshing state of harmonic gear reducer teeth
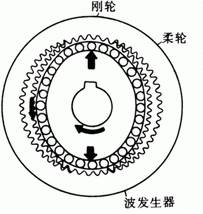
Schematic diagram of harmonic gear reducer operation
advantage
1. The transmission speed ratio is high.
The speed ratio range of single-stage harmonic gear transmission is 70~320, which can reach 1000 in some devices, and the speed ratio of multi-stage transmission can reach over 30000. It can be used not only for deceleration, but also for acceleration situations.
2. High carrying capacity.
This is because there are many teeth meshing simultaneously in harmonic gear transmission, and the number of teeth meshing simultaneously in double wave transmission can reach more than 30% of the total number of teeth. In addition, the flexible wheel uses high-strength materials, and the teeth are in surface contact with each other.
3. High transmission accuracy.
This is because in harmonic gear transmission, there are many teeth meshing simultaneously, and the error is averaged, that is, the multi tooth meshing has a mutual compensation effect on the error, so the transmission accuracy is high. When the gear accuracy level is the same, the transmission error is only about 1/4 of that of ordinary cylindrical gear transmission. At the same time, a slight change in the radius of the wave generator can be used to increase the deformation of the flexible wheel, making the backlash very small and even achieving backlash free meshing. Therefore, the harmonic gear reducer has a small transmission clearance and is suitable for reverse rotation.
4. High transmission efficiency and smooth movement.
Due to the uniform radial movement of the flexible wheel teeth during the transmission process, even at high input speeds, the relative slip speed of the teeth is still extremely low (therefore -% of that of ordinary involute gear transmission), resulting in low tooth wear and high efficiency (up to 69%~96%). Due to the fact that both sides of the gear are engaged in meshing and disengagement, there is no impact phenomenon and the movement is smooth.
5. Simple structure, few parts, and easy installation.
There are only three basic components, and the input and output shafts are coaxial, so the structure is simple and easy to install.
6. Small size and light weight.
Compared with general reducers, when the output torque is the same, the volume of harmonic gear reducers can be reduced by 2/3 and the weight can be reduced by 1/2.
7. Can transmit motion to enclosed spaces.
By utilizing the flexible characteristics of flexible wheels, this valuable advantage of wheel transmission is incomparable to other existing transmissions.
shortcoming
1. The flexible wheel undergoes periodic deformation, resulting in alternating stress that makes it prone to fatigue failure.
2. The moment of inertia and starting torque are large and not suitable for low-power tracking transmission.
3. Cannot be used in situations where the transmission speed ratio is less than 35.
4. The harmonic drive using a roller wave generator (free deformation wave) has an instantaneous transmission ratio that is not constant.
5. Poor heat dissipation conditions.
Application scenarios
Harmonic gear reducers are increasingly widely used in aviation, aerospace, energy, navigation, shipbuilding, biomimetic machinery, commonly used military equipment, machine tools, instruments, electronic equipment, mining metallurgy, transportation, lifting machinery, petrochemical machinery, textile machinery, agricultural machinery, and medical equipment. Especially in high dynamic performance servo systems, the use of harmonic gear transmission further demonstrates its superiority. It transmits power ranging from tens of watts to tens of kilowatts, but high-power harmonic gear drives are often used in short-term work environments.
MOTOR,Gear motor,Gear reducer,Reducer




Address: No.66 bis, Hetong Road, Dongfeng Town, Zhongshan City, Guangdong Province
Tel:0760-22189558
Mobile:13923325827

©2023 GUANGDONG YONGKUN MOTOR CO.,LTD All rights reserved




