
RV reducer domestic breakthrough battle: analysis of hard core technology for industrial robot "joints"
Release Time :
2025-04-21
Source :
network
Author:
Yongkun Motor
RV reducer domestic breakthrough battle: analysis of hard core technology for industrial robot "joints"
1、 Introduction at the beginning
In the welding workshop of the automobile factory, the six axis robotic arm completes the body splicing with a precision of 0.1 millimeters; In the logistics warehouse, Delta robots sort packages at a speed of 5 times per second - behind these "high-precision, high load" industrial wonders lies a "mechanical heart": RV reducers.
Why is it called the "core joint" of robots? How can domestic RV reducers break through Japan's 30-year monopoly? This article will deeply dissect this hardcore technology and reveal the breakthrough path of Chinese manufacturing.
2、 What is an RV reducer?
Definition and Status
The RV reducer is a two-stage reduction mechanism composed of planetary gears and cycloidal pinwheels, designed specifically for high torque and high-precision scenarios. Its transmission ratio can reach 30-260, the accuracy is stable within 1 arc minute, and the lifespan exceeds 6000 hours. It is the "performance ceiling" among the three core components of industrial robots (accounting for 30% of the cost).
Naming Origin
RV "originates from its principle of rotational vector transmission: by driving the cycloidal wheel with an eccentric shaft to mesh with the needle teeth, high-speed input is converted into low-speed high torque output, forming a mechanical characteristic similar to" vector rotation ".
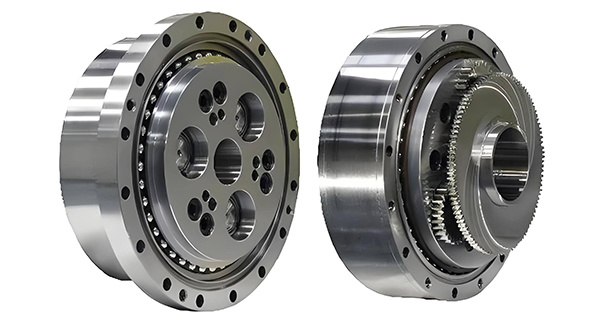
3、 Structural Disassembly: Industrial Artworks Precision to the Micron
Appearance features
Material: The outer shell is mostly made of high-strength aluminum alloy or cast iron, and the internal gears are made of carburized and quenched steel (such as 20CrMnTi);
Size: Diameter 50-400mm, weight 1-50kg, suitable for robots with a load of 6-600kg.
2. Core components
Cycloid wheel: The tooth profile is CNC ground with an accuracy of μ m, responsible for transmitting the main torque;
Needle tooth shell: Built in 30-40 precision needle teeth, meshing with the cycloid wheel to achieve deceleration;
Planetary carrier: connects the input shaft and the eccentric shaft, driving the cycloid gear to revolve;
Output disk: Fixed by bearings, it outputs power to the joints of the robotic arm.
4、 Working principle: Precision dance of power transmission
1. Transmission process
① First level reduction: The motor input shaft drives the planetary gear set to complete the initial reduction (transmission ratio 5-10);
② Secondary Reduction: The eccentric shaft drives the cycloidal gear to mesh with the needle teeth, resulting in a secondary reduction (transmission ratio stacked to 30-260);
③ Torque output: The rotation of the cycloid wheel is limited, and only the orbital motion is transmitted through the output disc, forming a high rigidity output.
RV gearbox,Reducer,Precision reducer




Address: No.66 bis, Hetong Road, Dongfeng Town, Zhongshan City, Guangdong Province
Tel:0760-22189558
Mobile:13923325827

©2023 GUANGDONG YONGKUN MOTOR CO.,LTD All rights reserved




