
Do humanoid robots actually use three types of reducers?
Release Time :
2025-05-26
Source :
network
Author:
Yongkun Motor
Do humanoid robots actually use three types of reducers?
The power system of humanoid robots is based on the deep collaboration of high-speed servo motors and precision reducers to construct an operating system. Servo motors are responsible for outputting high-speed rotational kinetic energy, while precision reducers use dual functions of torque amplification and motion accuracy adjustment to accurately adapt power to each joint.
The dynamic matching of the two not only meets the power requirements of high load areas such as hip joints and shoulders, but also ensures millimeter level motion accuracy of fine joints such as wrists and fingers, laying the foundation for the execution of complex robot movements.
In response to the differentiated needs of joints,
Three types of reducers form the core transmission matrix.
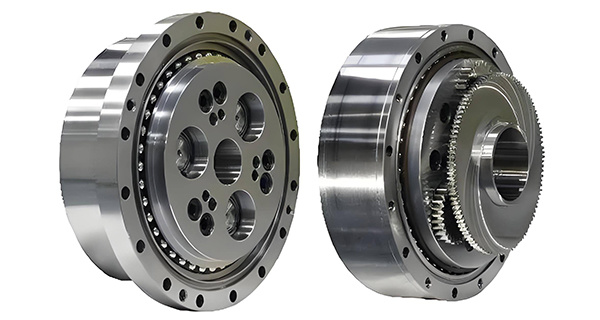
The RV reducer adopts a multi crankshaft planetary gear composite structure, which achieves 8000N · m ultra-high torque output through a two-stage reduction mechanism. It is specially designed to support the main joint of the robot's self weight and external loads;
The harmonic reducer relies on the principle of flexible wheel elastic deformation and forms a double arc meshing transmission under the action of the wave generator, achieving a motion accuracy of 0.1 arc minutes and accurately controlling the micro displacement of the end effector;
The planetary reducer achieves a high reduction ratio of over 100:1 with a modular planetary gear set, meeting the high-speed start stop and precision fine-tuning requirements of agile joints.
The core of reducer assembly lies in precision press fit technology. In key interference fit processes such as precision pressing of gears and shafts, and embedding of bearing components, the inflection point triggering control technology is used to identify pressure mutation characteristics in real time, accurately lock the optimal pressing termination point, and control the depth deviation of pressing within a very small range.
At the same time, interference fit requires real-time monitoring of the compression force displacement curve, capturing changes in force values in real-time through built-in force sensors to ensure that interference fluctuations are within a reasonable range. Equipped with position compensation function to ensure consistency in reducer assembly, the robot can achieve complex motion commands.
#Humanoid Robot # Reducer Assembly # Servo Press # Press Assembly # Press # Press # Force Displacement Monitoring # Humanoid Robot Core # Reducer on Humanoid Robot # Reducer # Turning Point Monitoring # Turning Point Detection
Reducer,Precision reducer,gear motor




Address: No.66 bis, Hetong Road, Dongfeng Town, Zhongshan City, Guangdong Province
Tel:0760-22189558
Mobile:13923325827

©2023 GUANGDONG YONGKUN MOTOR CO.,LTD All rights reserved




